- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик


The structure and working principle of universal joint
2023-10-31
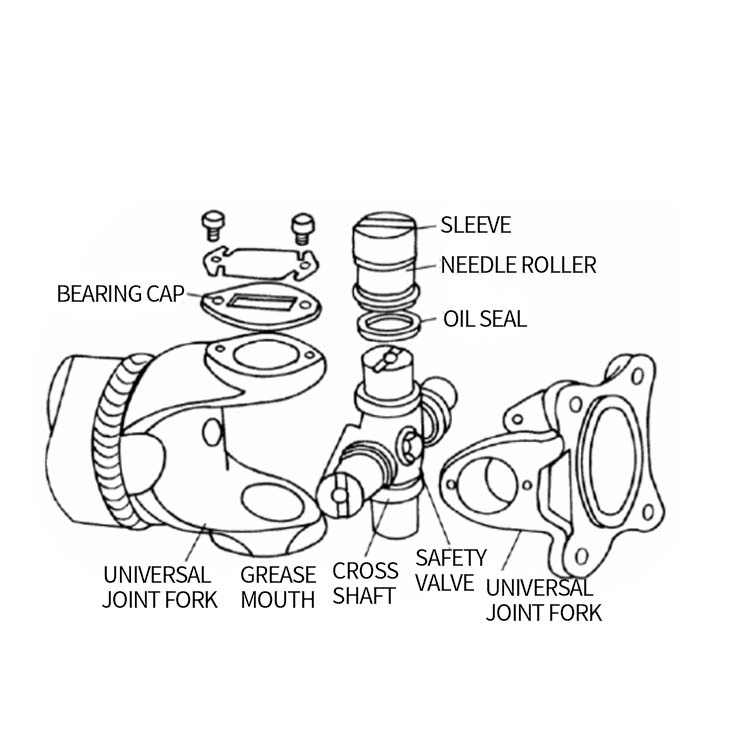
structure:
The cross-shaft universal joint is composed of a universal joint fork, a cross shaft, a needle bearing, an oil seal and a grease nozzle.
The holes in the universal joint forks fixed on the two shafts are respectively sleeved on the four journals of the cross shaft. A needle roller and a sleeve are installed between the cross shaft journal and the universal joint fork hole, and screws with locking plates and bearing caps are used to position them axially.
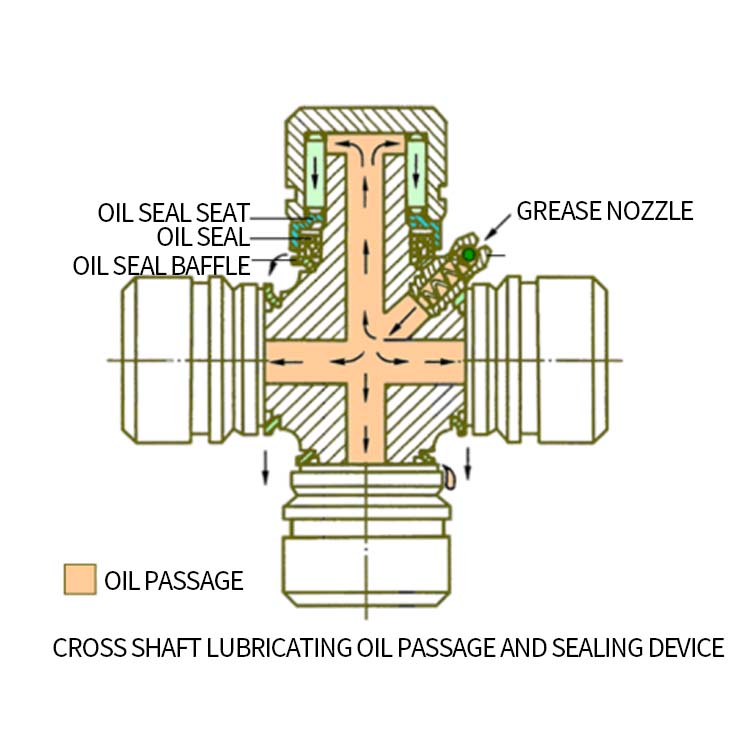
In order to lubricate the bearings, an oil passage is drilled in the cross shaft and is connected to the oil nozzle safety valve.
The function of the safety valve on the cross shaft of the cross shaft universal joint is to protect the oil seal from being damaged due to excessive oil pressure.
The non-uniform speed of a single ordinary universal joint will cause torsional vibration of the driven shaft and the transmission components connected to it, resulting in additional alternating loads and vibration noise, which will affect the service life of the components.
Speed characteristics:
When the active fork of the cross-axis universal joint rotates at constant angular speed, the driven fork rotates at unequal angular speed.
When the driving fork shaft 1 rotates at a constant angular speed, the driven fork shaft 2 has unequal angular speed. The angular speed of the slave fork shaft 2 changes back and forth between the maximum value and the minimum value, with a period of 180°; the angular speed of the slave fork shaft 2 is unequal. The degree of speed increases with the increase of the angle between the shafts.
The average speeds of the main and driven shafts are equal, that is, when the driving shaft rotates once, the driven shaft also rotates once.
Unequal velocity refers to the angular velocity within one rotation.
Conditions for constant angular speed transmission of cross-axis universal joints
(1) Adopt double universal joint transmission;
(2) The angle a between the two axes of the first universal joint is equal to the angle a2 between the two axes of the second universal joint;
(3) The driven fork of the first universal joint and the driving fork of the second universal joint are in the same plane.